Многие, смотря на описание ЧПУ контроллера, задаются вопросом о таком параметре, как максимальная частота импульсов. Давайте попробуем разобраться, что это такое и на что это влияет?
Влияет это, конечно, на конечную скорость станка. Разумеется, она зависит не только от электроники, но и от механики. Но в данном случае, мы будем рассматривать систему лишь с точки зрения электроники.
Для примера посчитаем максимальную скорость, которой нам позволит достичь электроника при использовании платы PCIMC-3D и драйверов DM556. У платы PCIMC-3D максимальная частота импульсов 47 kHz.
Для понимания расчетов произведем их под разный шаг ШВП, возьмем шаг 5, 10, 20. В конце это позволит нам определиться с тем, какой именно ШВП нам целесообразно использовать.
Итак, начнем «из далека». Шаговый двигатель имеет свой шаг. У биполярных шаговых двигателей два основных типа HS (к примеру 57HS76-3004) и НМ (к примеру 57HM76-3004). У двигателей HS один шаг это 1,8 градуса, у HM в половину меньше т.е. 0,9 градуса. В сфере ЧПУ станков в 90% используются шаговые двигатели HS, и мы также советуем вам остановиться именно на них. Таким образом, для шагового двигателя HS при одном шаге в 1,8 градуса требуется 200 импульсов на оборот.
Любой драйвер позволяет производить деление шага. Это необходимо для точности позиционирования и плавности перемещения. Деление шага на драйвере DM556, DM542 находятся либо на самом драйвере и называются Pulse/rev Table, либо в руководстве. Деление шага выставляется путем комбинации переключателей на драйвере, согласно таблице.
Пример таблицы на драйвере DM542:
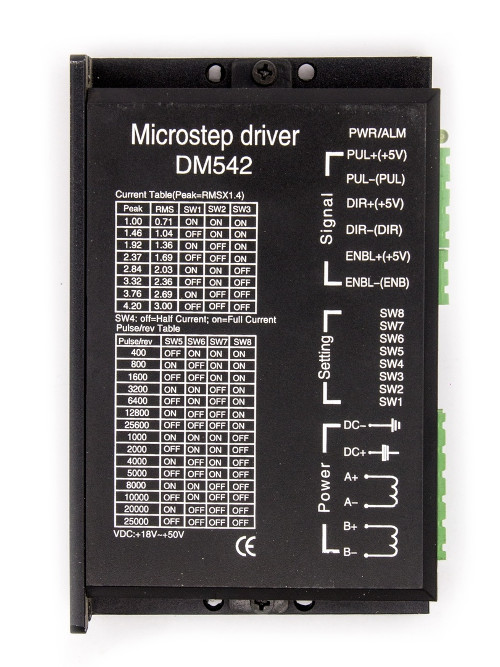
Как таковое деление шага 1/1 (т.е. 200 шагов на оборот двигателя HS) никогда не используют. В данной таблице деление шага указано уже в имп./оборот для удобства. К примеру, 800 имп./оборот в данной таблице это деление шага ¼ (т.е. 200 х 4).
По нашему мнению, самые оптимальные значения деления шага 800, 1600, 3200. Помните, что чем выше деление шага, тем больше плавность перемещения, но тем большая потеря момента (стоит учесть что потеря момента крайне незначительна, но есть). Если вы планируете использовать ваш станок для работ на высоких скоростях (6000 мм/мин и выше), то стоит выбрать меньшее деление шага.
Итак, с шагами двигателя и делением шага на драйвере разобрались, поехали дальше.
В начале статье мы выяснили, что частота у нашей платы PCIMC-3D 47kHz.
47 kHz это частота 47000 импульсов в секунду. Скорость на нашем станке мы хотим узнать в мм/мин, поэтому частоту также переведем в импульсы в минуту, получим: 47000*60 = 2820000 импульсов в минуту.
Исходя из вышесказанного, мы решили, что будем использовать шаговый двигатель HS и на нашем драйвере выставим деление шага 1/8 т.е. 1600 импульсов на оборот.
Теперь узнаем, сколько оборотов в минуту, мы сможем достичь: 2820000/1600 = 1762,5 оборота в минуту.
Ранее мы говорили о том, что будем делать расчет для разных ШВП с шагом: 5, 10, 20.
Поскольку наш шаговый двигатель может достичь максимальных оборотов в 1762,5 об./мин, то при винте с шагом 5 мм/об. максимальная скорость станка будет равна 1762,5 х 5 = 8812,5 мм/мин. Подобным образом сделаем расчет для в винта с шагом 10. 1762,5 x 10 = 17625 мм/мин. И для винта с шагом 20. 1762,5 x 20 = 35250 мм/мин.
Разумеется, это максимальные параметры, и, как я и говорил, реальная максимальная скорость зависит не только от электроники, но и от механики.
Давайте приведем наши расчеты в «божеский вид» и выведем красивую формулу:

Частота контроллера (Hz)— характеристика контроллера ЧПУ, указывается в описании и руководстве к плате. Обратите внимание, что частота в описании указывается в kHz. Для того, чтобы перевести в Hz необходимо умножить на 1000.
Шаг передачи (мм) — расстояние в мм, которое проходит ваш станок за полный оборот шагового двигателя.
Деление шага — дробление шага, выставленное на драйвере шагового двигателя. Обратите внимание, что на некоторых драйвера указывается уже полученное значение деления шага, а не само дробление. К примеру, в таблице на драйвере DM556 значение 1600 есть ни что иное, как 200 х 8.
Вывод: надеюсь, данная статья поможет вам легко определить, стоит ли вам гнаться за платой с высокой частотой, или же вам достаточно бюджетного варианта со сравнительно низкими параметрами.
F.A.Q.
Надеюсь, данная рубрика будет постоянно пополняться вашими вопросами и нашими ответами на них.
1. Какая максимальная частота импульсов для драйвера шагового двигателя?
Производителями большинства драйверов установлена максимальная частота входных сигналов в 200 kHz. Однако, стоит сделать поправку. При проведении опытов установлено, что в 90% случаев уже на 170 kHz начинают проявляться уходы, пропуски и другие дефекты. Поэтому в случае, если вы планируете работать на высокой частоте, я бы советовал вам установить «порог надежности» в 150 kHz.
Но, как вы успели убедиться в статье, 150 kHz это более чем достаточно!
2. Какая частота у LPT плат?
Для примера возьмем плату LPT-DPTR 1.03. Она, как и большинство подобных плат по своей сути не является генератором импульсов. Она является всего лишь усилителем и элементом защиты. На самом деле импульсы в данном случае формирует компьютер.
Если обратиться к Mach3, то в настройках (Config — Ports&Pins) мы увидим возможность переключения частоты от 25 kHz до 100 kHz. Не стоит «на слово» верить голым цифрам.
Частота зависит на 100% от характеристик вашего компьютера. Делясь накопленным опытом, могу сказать, что большинство рядовых компьютеров могут поддерживать частоту в 45 kHz. Лишь некоторые, более мощные и совершенные, в 60 kHz. Компьютеров, стабильно работающих на частоте свыше 60 kHz, за всю историю встречено не было :)